
Page 9 - Forum-2021-JanToMarch
P. 9
• Δd_xyGPS: Video location accuracy
(latitude and longitude) in meters.
• Δd_zGPS: Video location accuracy
(altitude) in meters.
• Δd_xyZPos: Location accuracy of
reference objects (latitude and longi-
tude) in meters.
• Δd_zZPos: Location accuracy of refer-
ence objects (altitude) in meters.
Formula 1
• Ratio of the recorded object resolu-
tion in pixel and object size in meters.
With reference to Figure 1, the formula
considers different errors. To place the
video informationin in 3-D, a reference
object (Obj) as well as the observer (O)
location are required. By knowing the
positions of “O” and “Obj,” the minima and
maxima altitude of the aircraft can be cal- Formula 2
culated by the formula below. The default
error tunnel (grey cone) is the result of an
aproximated model, showing the possible
area where the altitude of the observed
object was located. The error tunnel
dimension is based on the known errors,
such as the camera’s position accuracy, as
well as the video resolution. Another influ-
encing factor of the default tunnel’s size is
the distance between the observer and the
reference point, as a small miss-position-
ing of the observer resulting in a variation
of the observed object’s height. As the var-
iation gets larger, the closer the reference
object is relative to the position (latitude/
longitue) to the observer.
Formula 1 is used with its derivations to
calculate the elevation error based on the
reconstructed distance to the object.
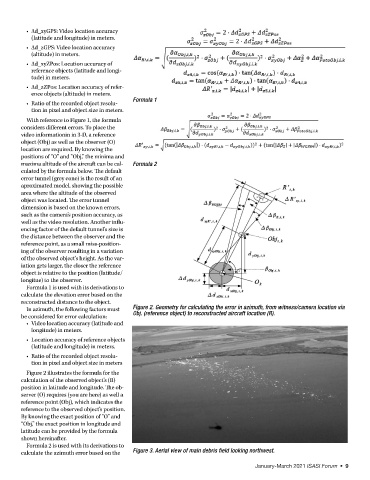
In azimuth, the following factors must Figure 2. Geometry for calculating the error in azimuth, from witness/camera location via
be considered for error calculation: Obj. (reference object) to reconstructed aircraft location (R).
• Video location accuracy (latitude and
longitude) in meters.
• Location accuracy of reference objects
(latitude and longitude) in meters.
• Ratio of the recorded object resolu-
tion in pixel and object size in meters
Figure 2 illustrates the formula for the
calculation of the observed object’s (R)
position in latitude and longitude. The ob-
server (O) requires (you are here) as well a
reference point (Obj), which indicates the
reference to the observed object’s position.
By knowing the exact position of “O” and
“Obj,” the exact position in longitude and
latitude can be provided by the formula
shown hereinafter.
Formula 2 is used with its derivations to
calculate the azimuth error based on the Figure 3. Aerial view of main debris field looking northwest.
January-March 2021 ISASI Forum • 9